Plan
To successfully land a drone on a moving platform, the first step is to fully understand and characterize the situation. As mentioned earlier, the deck of the boat moves along six degrees of freedom (three axes of translation and three axes of rotation), although some movements may be less pronounced than others. This constant motion reduces the window of opportunity for the drone to safely execute a landing.
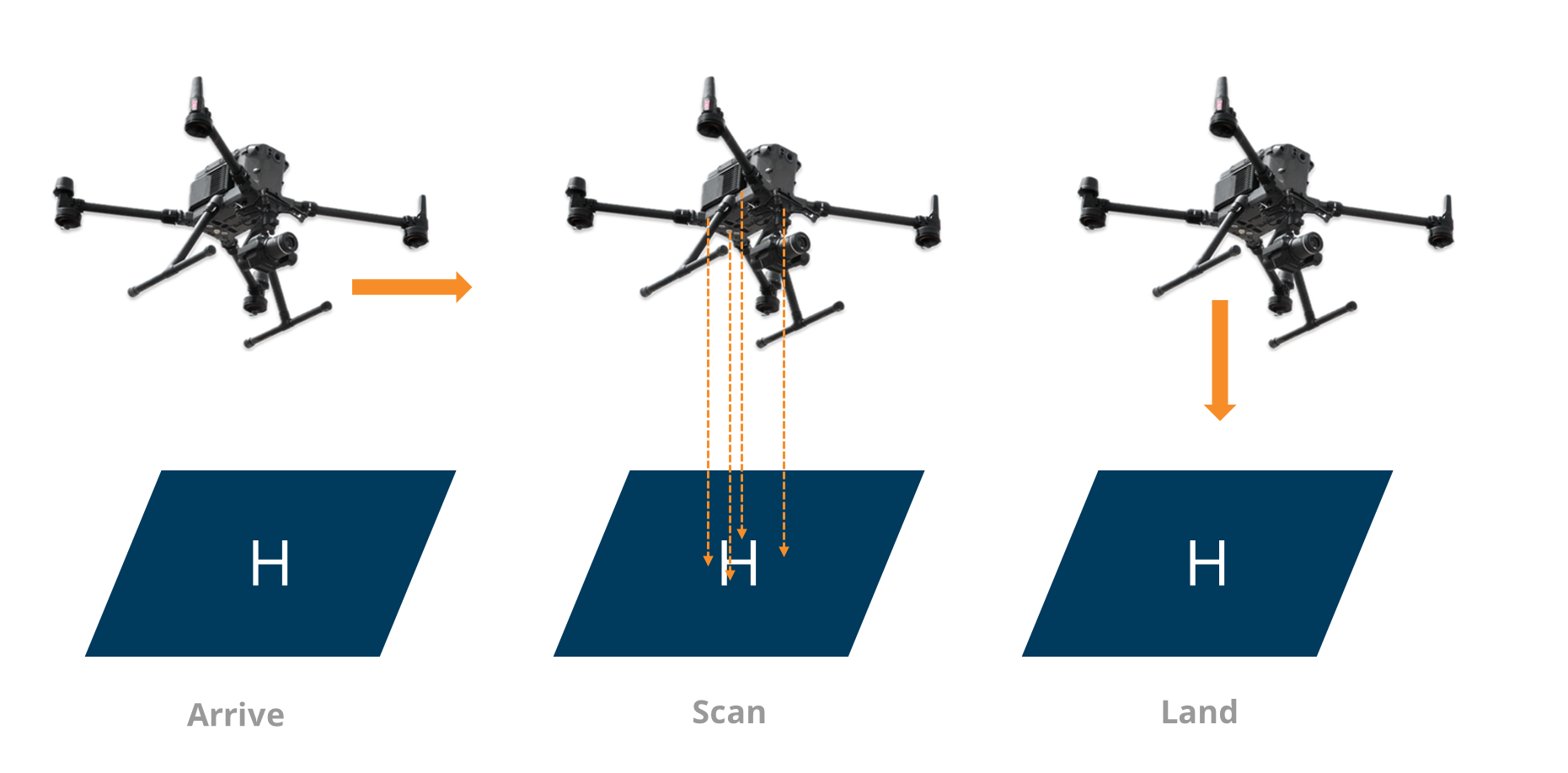
In order to identify the ideal moment for landing, the drone needs to continuously monitor the position and orientation of the landing pad on the deck in real time, assess the moment of least risk, and then commit to a landing. This decision must take into account the motion dynamics of the landing pad, the center of gravity of the drone, the performance and reaction time of the drone, and impact moment it can withstand -- in other words, the structural strength of the DJI M350.
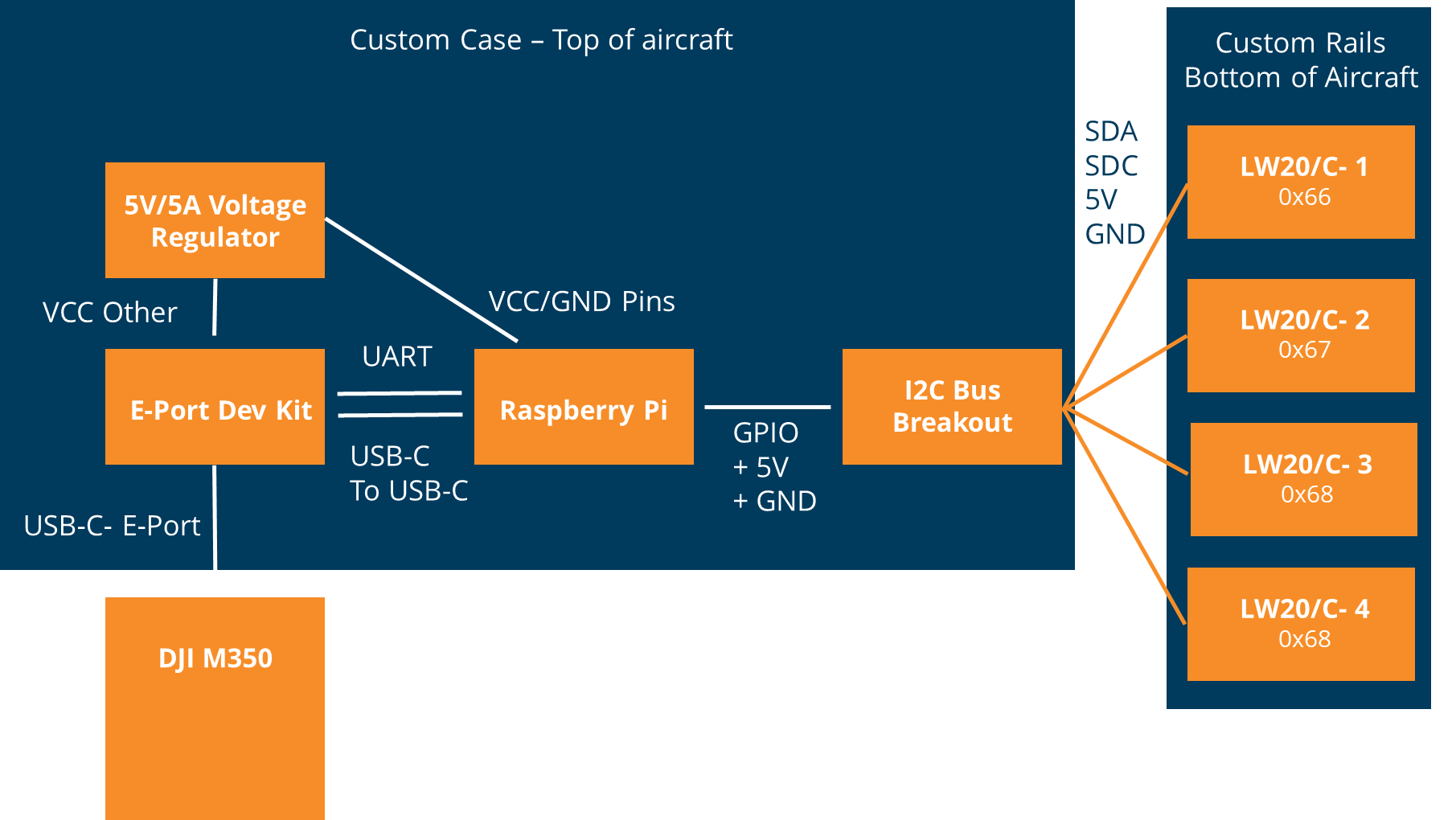
While the DJI M350 comes equipped with various sensors, most are not accessible for developers to modify. However, the DJI Payload Software Development Kit (SDK) enables integration of LightWare sensors and control logic, allowing the customization of the landing behavior. By integrating LightWare's LW20/C LiDAR sensors and an onboard computer, a custom landing mode tailored to the specific challenge of landing on a moving platform can be developed.
The architecture involves setting up an array of LW20/C LiDAR sensors to continuously scan the distance between the drone and the landing platform's surface and recreate the plane it represents. This data is processed in real time by the onboard computer to make informed decisions about the safest moment to land. Using the Payload SDK, the landing sequence can be executed with precise control, ensuring safety and accuracy.